

รายละเอียดสินค้า
| ไฮไลท์ |
ชุดหุ่นยนต์ช๊ตบาสแบบไม่ต้องใช้คอลโทรนเลอร์ตัวบังคับสาย4มอเตอร์
มอเตอร์1-2ซ้ายขวา มอเตอร์3เก็บปิงปอง มอเตอร์4 ยิงหรือชู๊ตปิงปอง
และที่สำคัญราคาประหยัดมาก
|
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
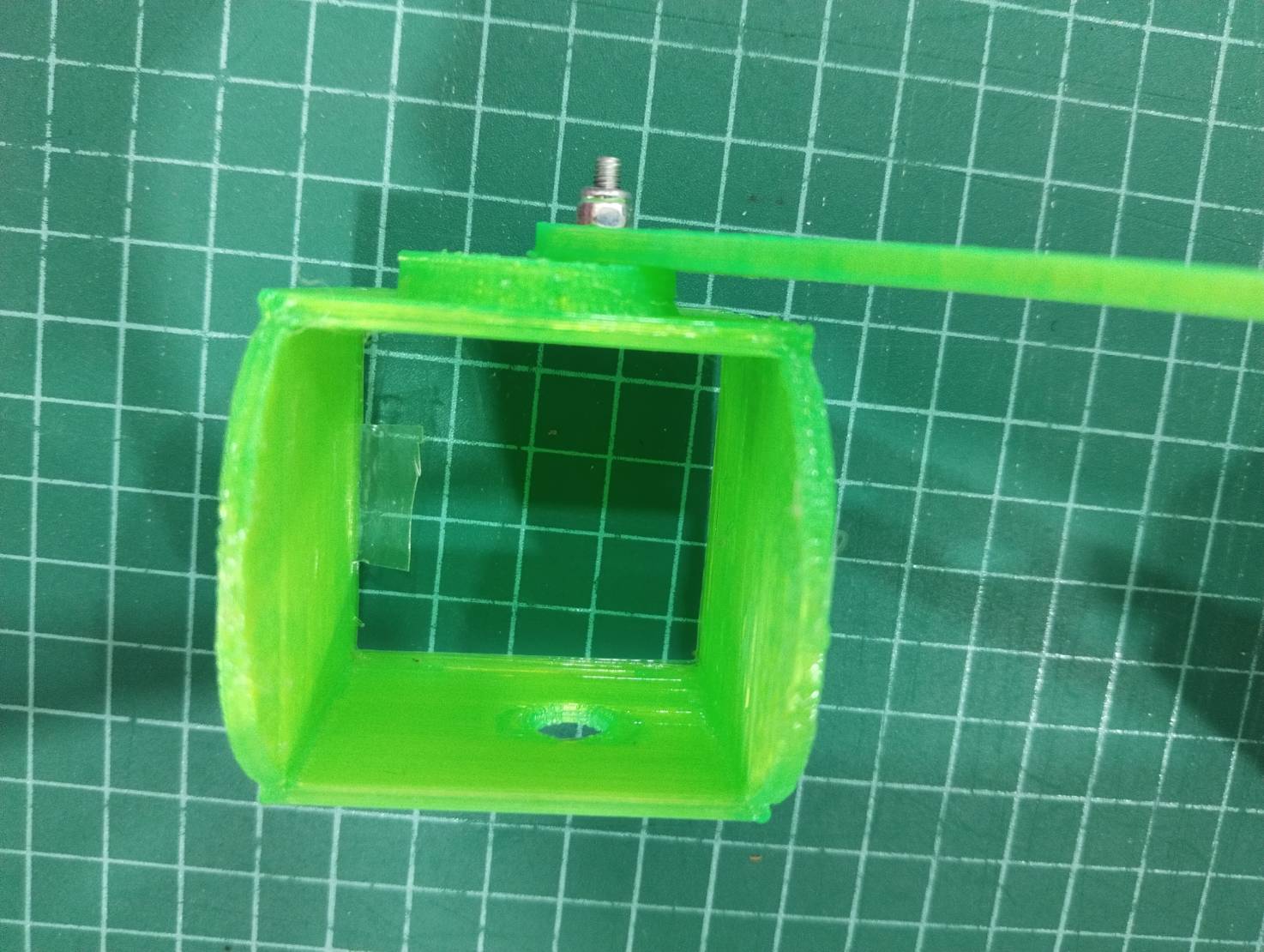
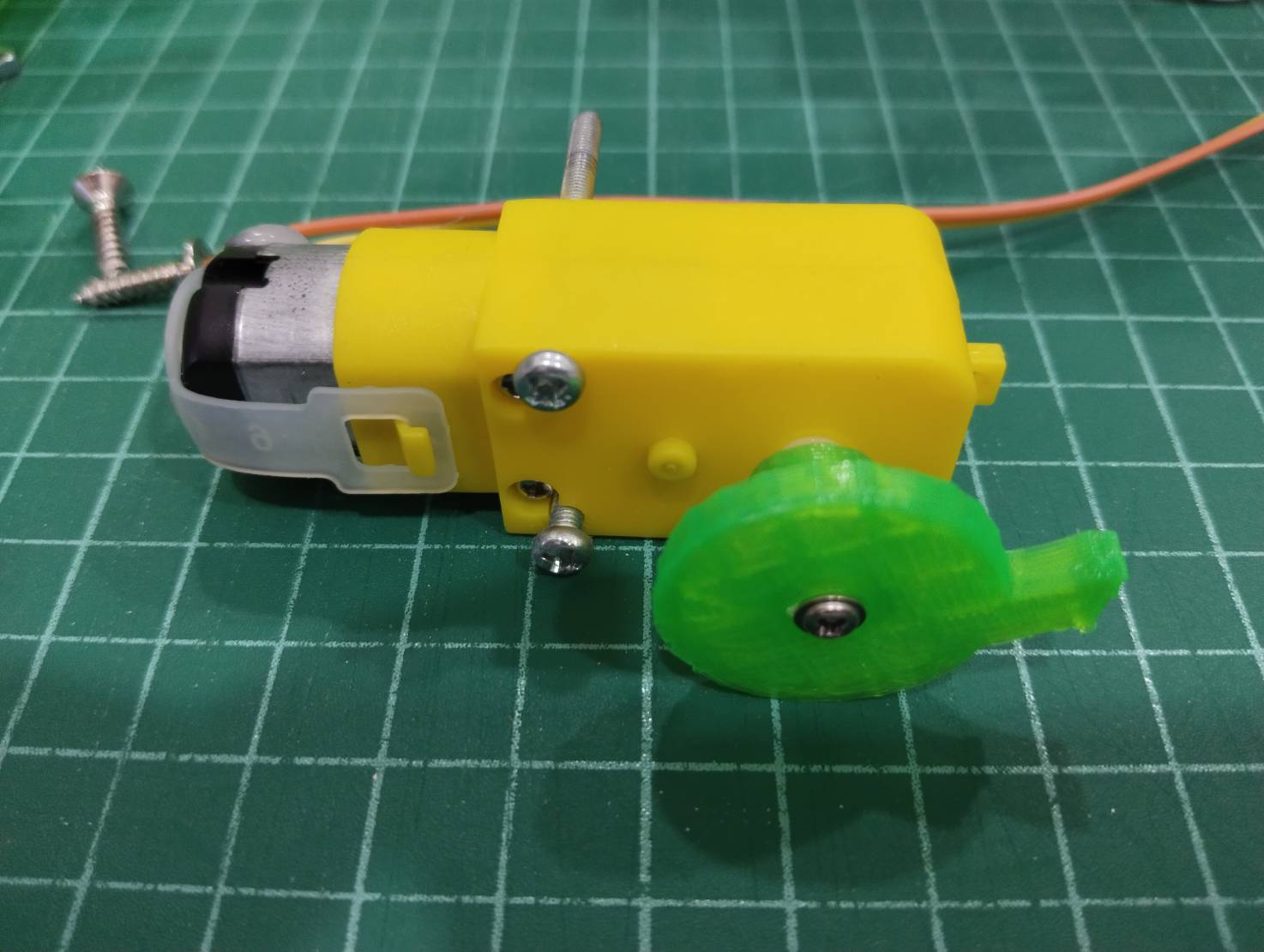
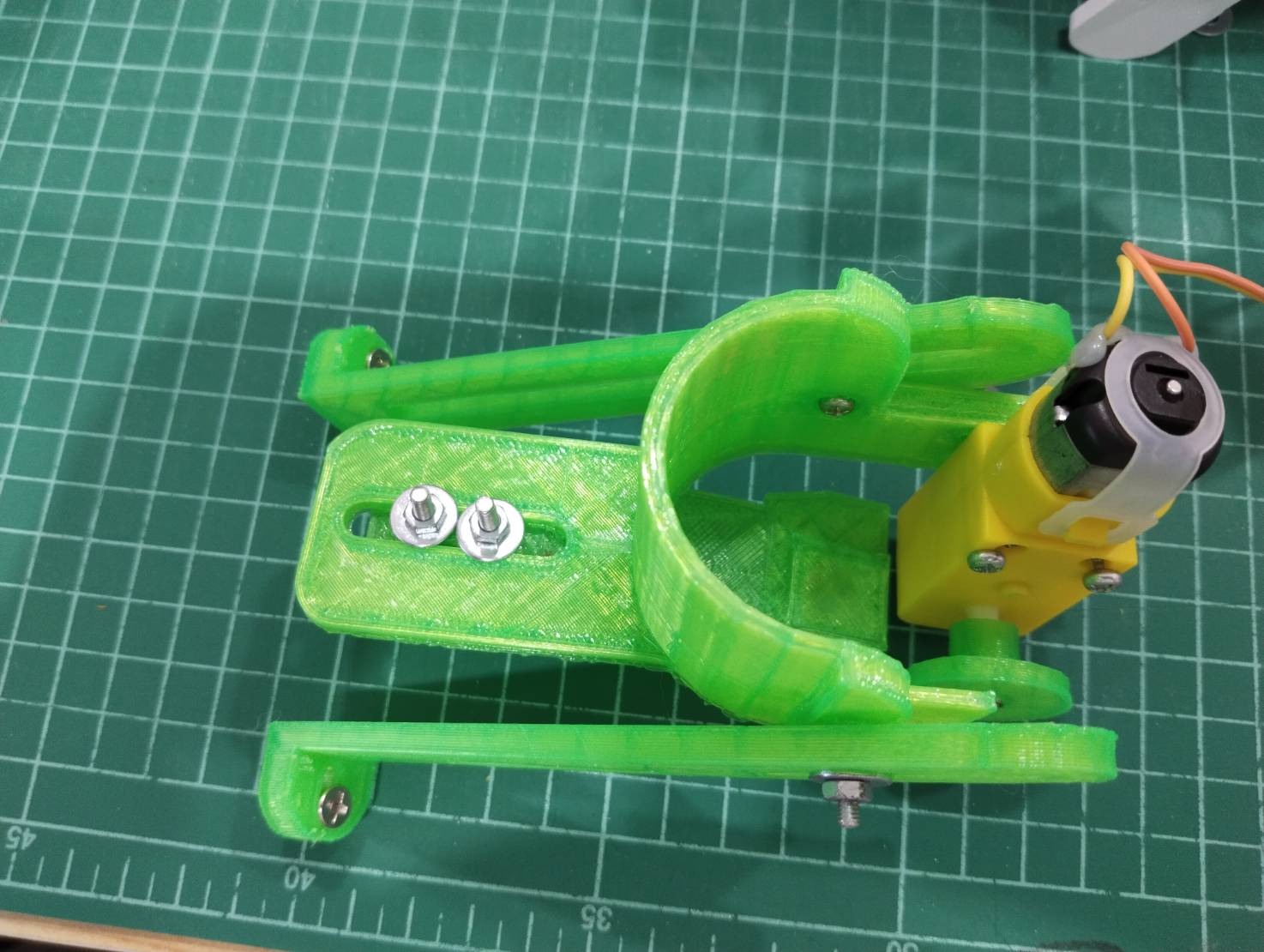
ชุดนี้มีมอเตอร์ 4 ตัว ระบบเดินหน้าซ้ายขวา และตัวยก ตัวยิง ทั้งหมด 4 ตัว พร้อม ต่อ สายรีโหมดบังคับได้เลย
หุ่นยนต์นักบาสเกตบอล แบบบังคับสาย(แบบไม่ใช้วงจรคอนโทรนเลอร์)    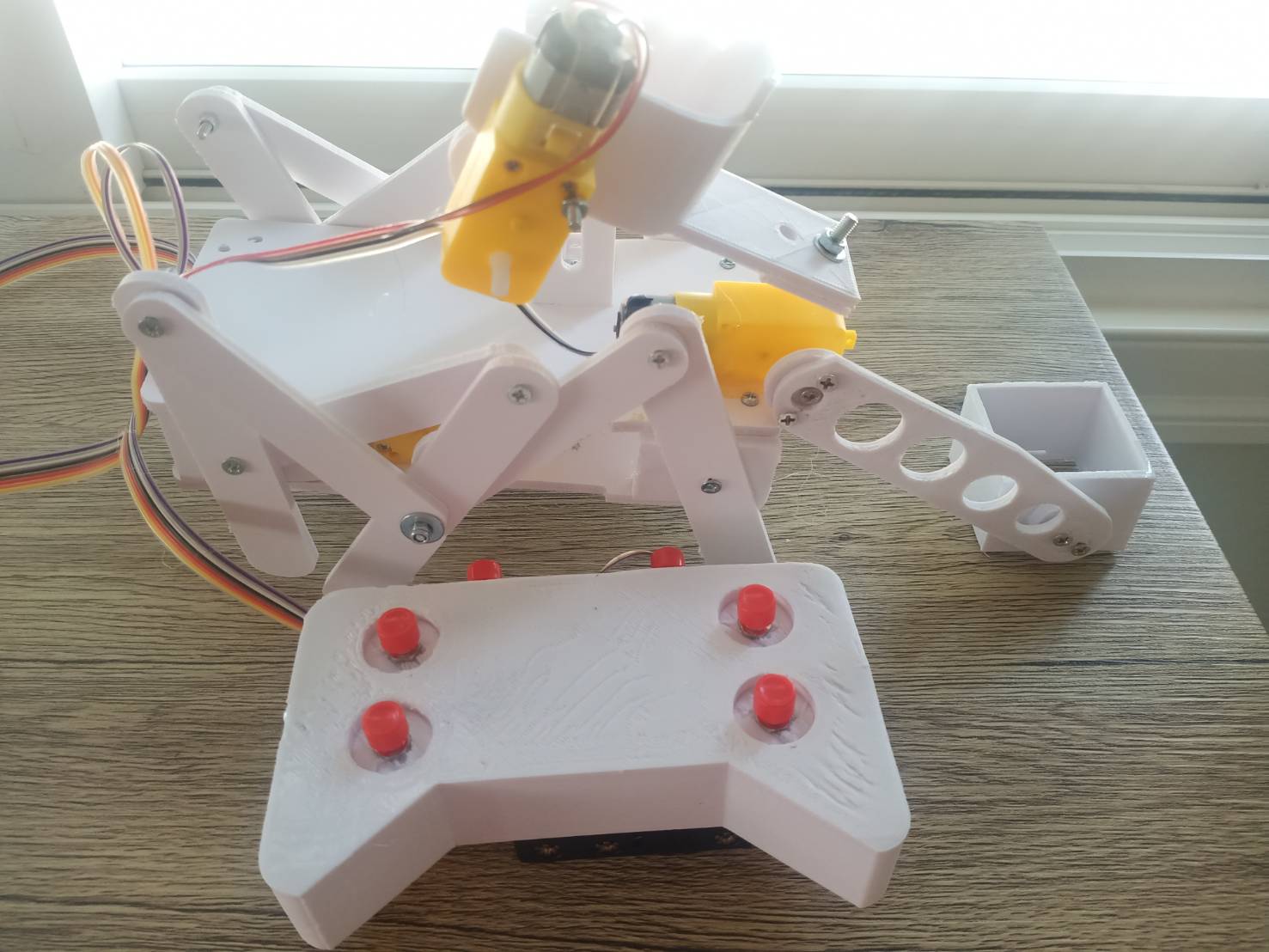 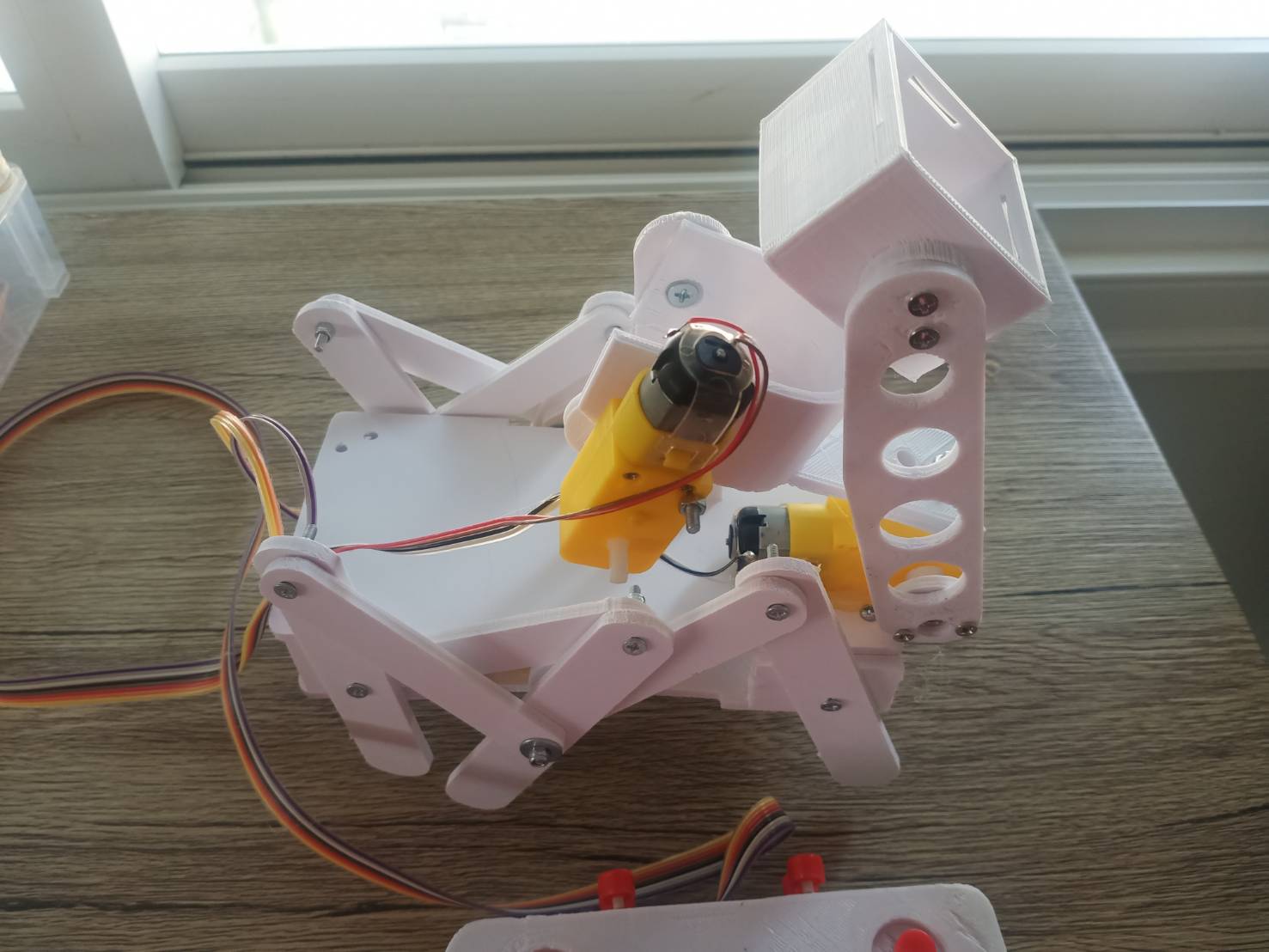 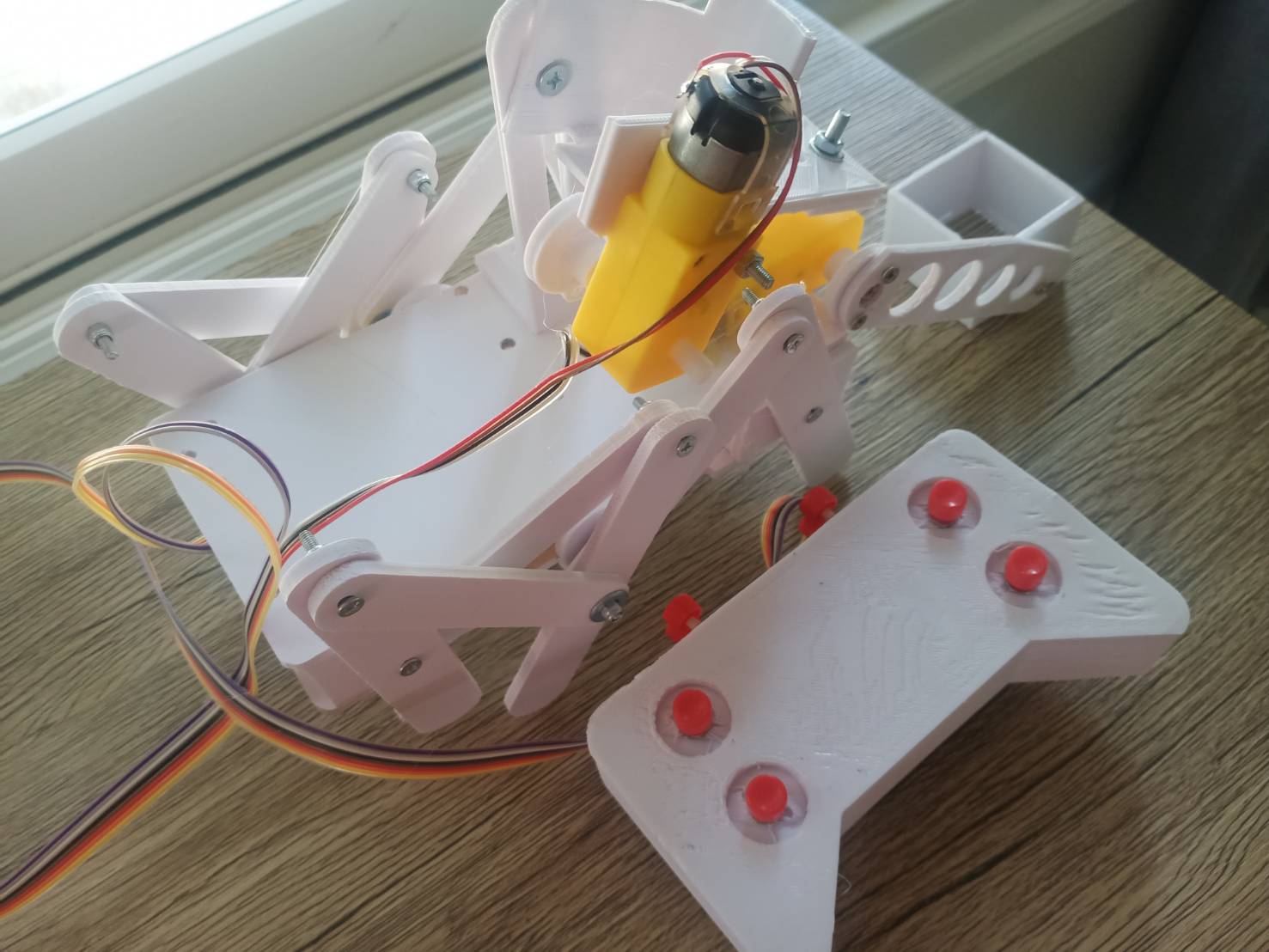 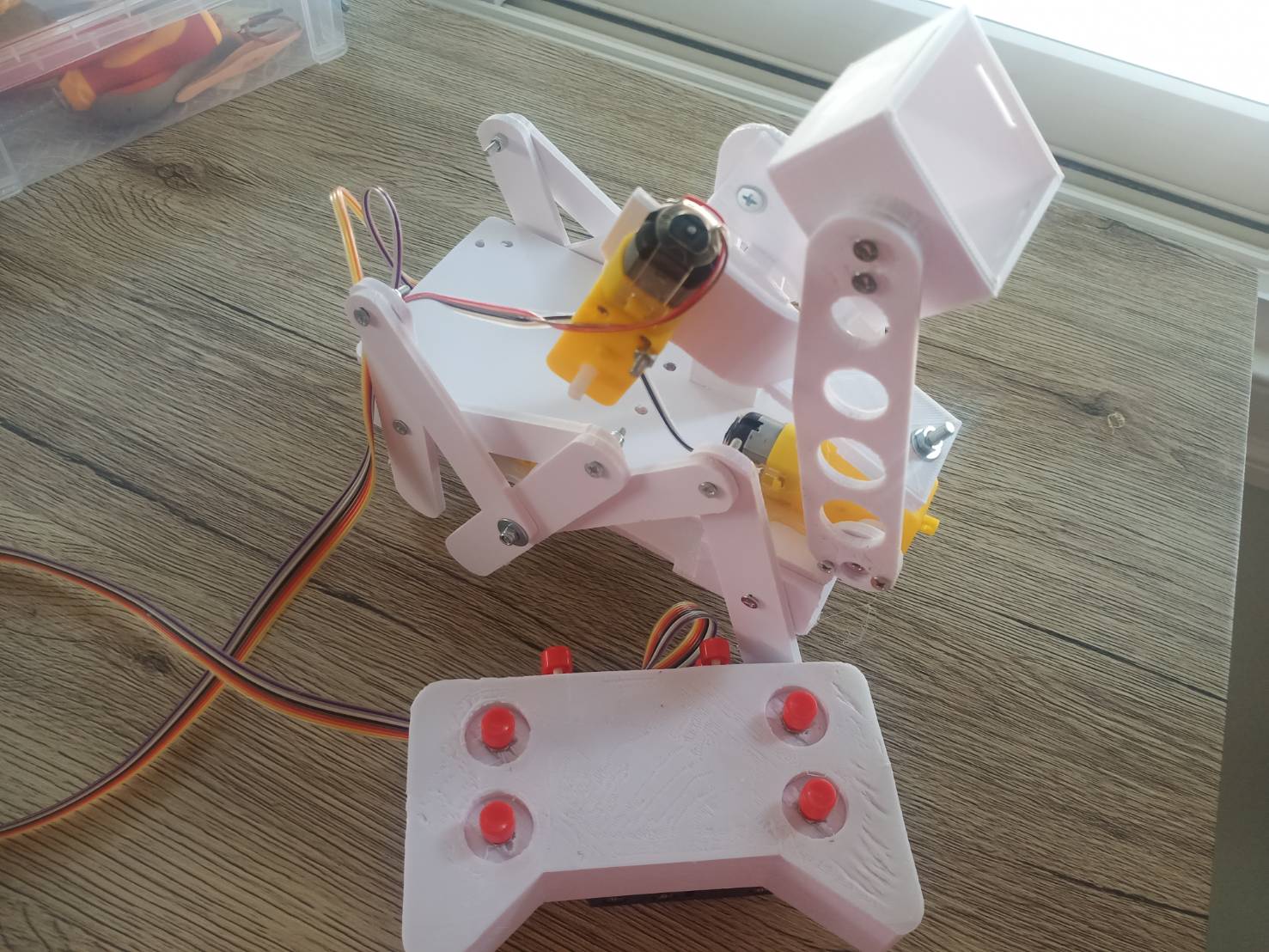 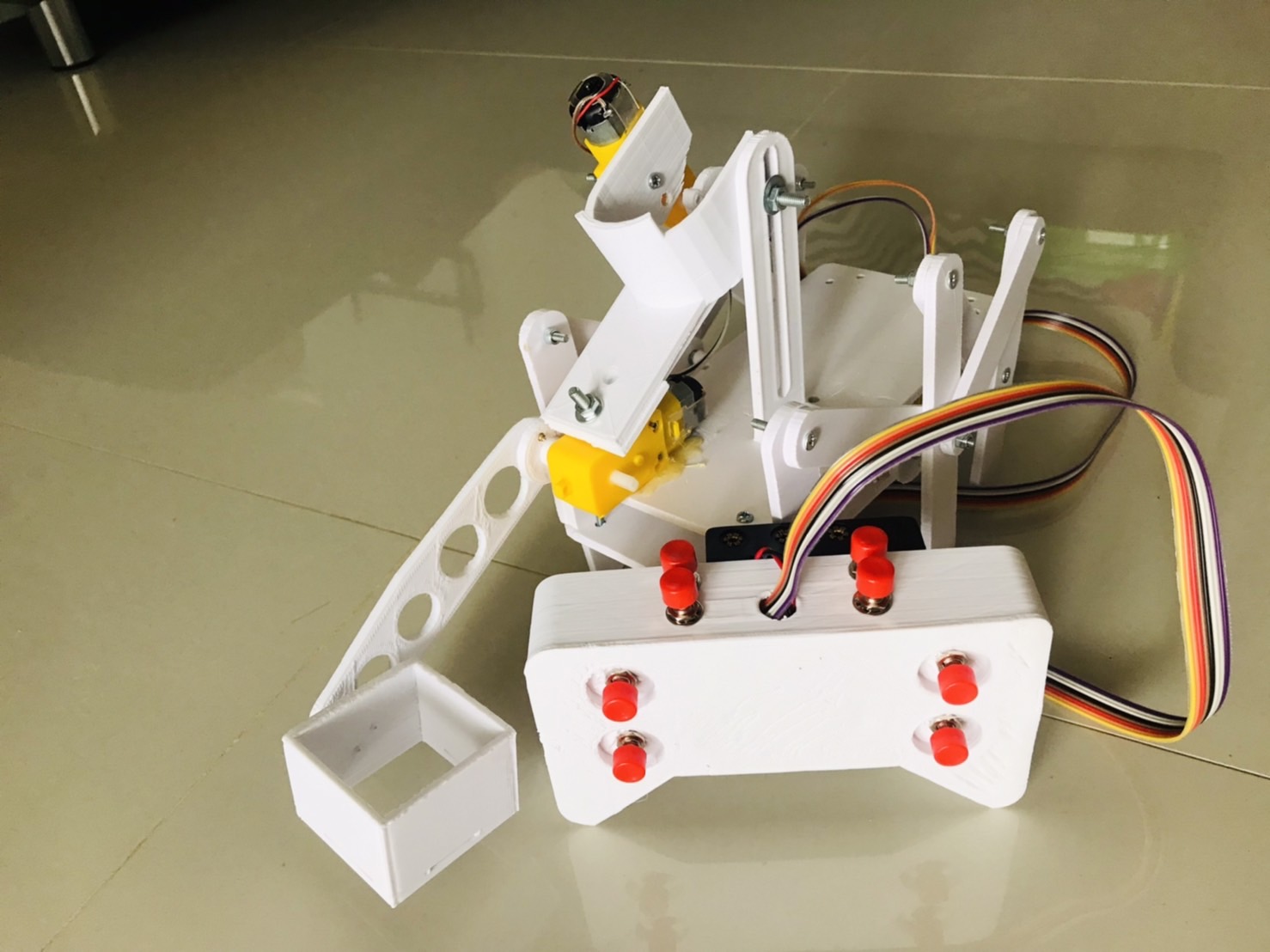  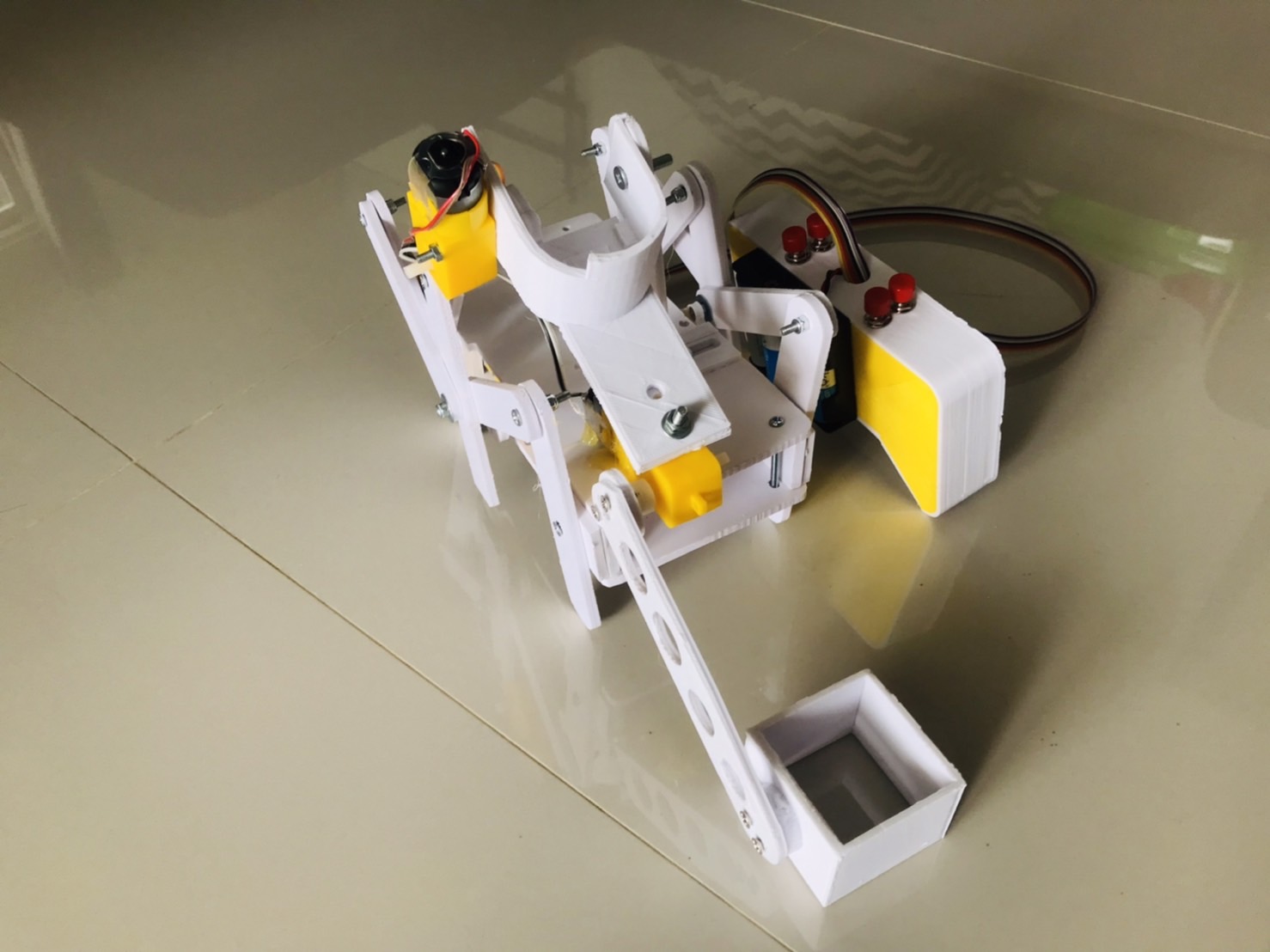  |
| เงื่อนไขอื่นๆ |
 วิธีประกอบหุ่นยนต์นักบาส แบบบังคับสาย1 วันที่ผ่านมา
|
| Tags |

▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

รับอบรมหุ่นยนต์ รับบสร้างหุ่นยนต์ รับสอนหุ่นยนต์ รับอบรมกิจกรรมหุ่นยนต์ รับบสร้างหุ่นยนต์ รับสร้างปัญญาประดิษฐ์ สมาร์ชโรโบติกส์
รับอบรมหุ่นยนต์ รับบสร้างหุ่นยนต์ รับสอนหุ่นยนต์ รับอบรมกิจกรรมหุ่นยนต์ รับบสร้างหุ่นยนต์ รับสร้างปัญญาประดิษฐ์ จำหน่ายชุดฝึกเพื่อการศึกษา รับสอน เขียนโปรแกรมควบคุมบอร์ด arduino ด้วยภาษา C รับสอน เขียนโปรแกรมควบคุมบอร์ด Micro Bit ด้วยบล็อกคำสั่ง รับสอน สร้างแอพพลิเคชั่นด้วย MIT App inventor รับสอน การเขียน PLC ควบคุมระบบ automation ในงานอุตสาหกรรม
เบอร์โทร : 0847999639
อีเมล : woottermfun1@gmail.com
อีเมล : woottermfun1@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม